

Underwater navigation is hard because of the absence of GPS.
It becomes even tougher when you want to navigate with just a COTS IMU, a depth sensor and without DVL
We have succesfully demonstrated through Hardware In Loop Simulations (HILS) the ability of Aquagrid to do the following
Provide reliable estimates of position, velocity and attitude for closed loop autonomous navigation
Veriied through simulations that the inevitable phase lag caused by the estimator does not cause instabilities in closed loop
Verified through simulations that in the event of a full triangulation solution not being possible, that the Aquagrid system works with raw ranges from 3 or even 2 buoys
An additional benefit is that the system integrates seamlessly with our C3 system.
We envision using our cloud based C3 system (Stardust) to send command and control messages to AUV swarms as well as receive telemetry from them.
Each Aquagrid buoy comes equipped with additional features like wireless transmitters and receivers and can act as a relay between underwater and surface vessels.
Therefore, not only is it possible to manage swarms of AUVs remotely, but it is also possible to make them coordinate their movements with surface vessels.
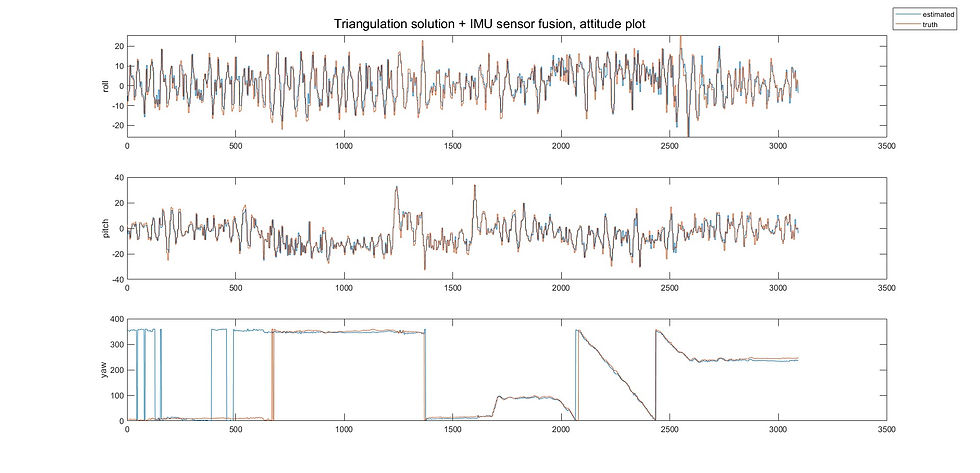
The following picture illustrates the precise tracking of AUV attitude by the Aquagrid system
The following picture illustrates the velocity tracking ability of Aquagrid

The following picture illustrates the ability of the AUV to follow complicated 3D trajectories like a helix.

After succesful completion of real world tests of Aquagrid in Spring-2025, we will venture into the field of AUV autopilots by converting an ROV into an AUV.
Comments